We spoke with Mark Cracknell, Head of Technology at Zenzic, about the newly released Geodata report – analysis and recommendations for self-driving vehicle testing. The report, which is available to download here, explores geospatial data requirements for the self-driving future.

What is geospatial data?
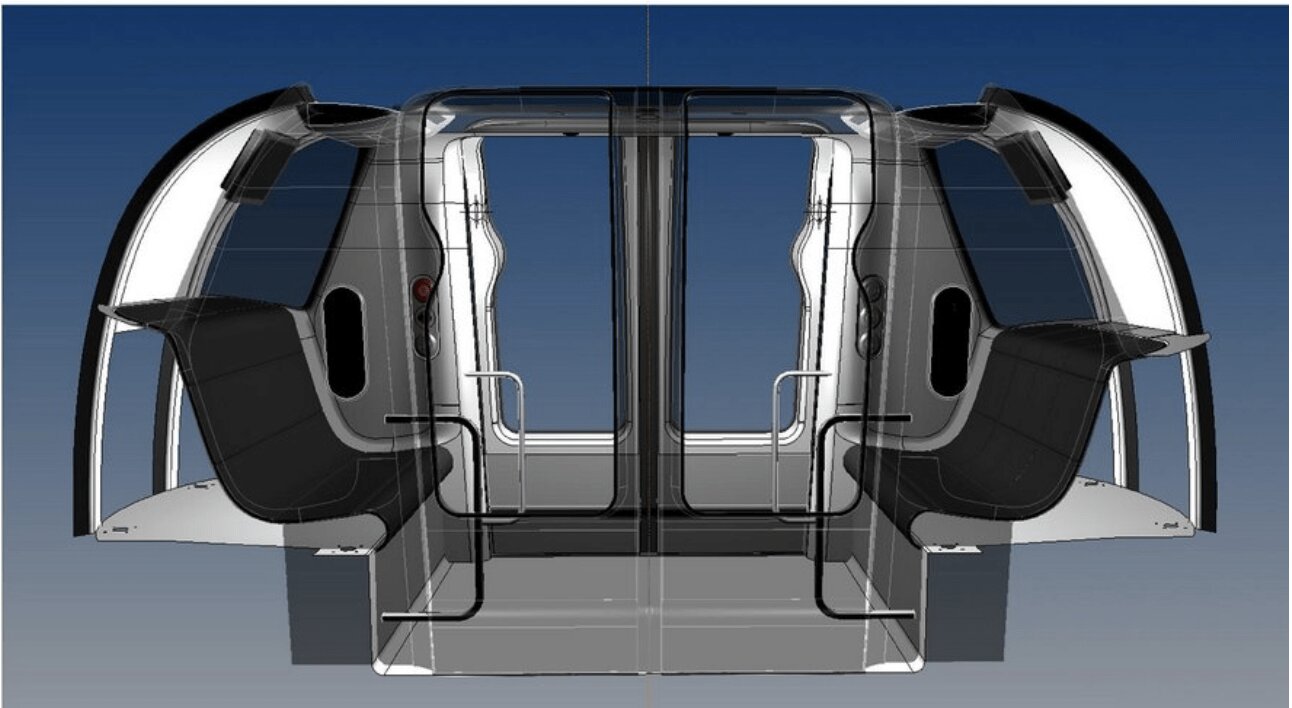
When we consider geospatial data in the context of connected and automated mobility (CAM), we are drawn to images of 3D point clouds of laser scanning data, or high-resolution virtual worlds that contain fully self-driving vehicles. It’s true that these are indeed cases where geospatial data is used. But it’s much broader than this.
Geospatial data is so intrinsic to the safe operation of connected and self-driving vehicles that all data used is closely linked to geospatial elements.
In short, geospatial data describes the environment of elements within it with regards to its absolute or relative positions. Additionally, it is used to locate those elements within a defined space or geography. It applies as equally to both vehicles themselves, as the environment and infrastructure those vehicles are connected to.
Why is geospatial data important for CAM technologies?
Geospatial data is critical for CAM technologies as it provides the foundations for sharing data. CAM is based on the movement of people, goods and vehicles. The need to share data depends upon understanding what it means and having a common reference point or set of standards.
Almost all data shared between vehicles, infrastructure and systems need to reference relative or absolute positioning so that it has context and meaning to the user. Imagine a vehicle approaching a set of traffic lights. The lights tell the vehicle to stop if it is proceeding straight ahead, but not if it is turning left (a left filter arrow). How does the vehicle know which lane to be in, where it should stop? In some cases, relying on the lights themselves or lane markings may not be sufficient. In this scenario the data shared must be understood by both systems and use some form of geospatial references. This is key to technologies such as SPATMAP (Signal Phase and Timing MAPs), which support the smooth flow of connected traffic.
Don’t we already have high quality maps and mapping services such as Sat Navs? What more do we need?
Mapping providers such as Sat Navs are already providing high quality maps, which are fit for purpose. However, this purpose is predicated on human drivers. Human drivers take this information and process it, using a lifetime of contextual understanding of how that data relates to the driving task. The map data is not the only means of ensuring safe driving. We rely on our eyes, ears, experience, as well as many other factors. When a self-driving vehicle is using this data, the resolution of information needed is much higher. Until sensor and perception systems advance, they will need to be supported by higher resolution geospatial data, which provides additional information to help the self-driving task.
Do self-driving vehicles require geospatial data to drive?
There are two approaches to how automated driving system (ADS) developers are approaching the task of mapping and geospatial data. The first is to create such mapping information internally. In this approach, ADS developers will “ghost drive” a route and scan and map the environment that is then processed according to the specific needs of the ADS stack. This data is then used to drive the route autonomously using the mapped environment to validate the sensor and perception data generated in real-time.
The second approach is to use high-quality external mapping data. In this scenario there are additional concerns by some that this data set must meet the appropriate standards for reliability and availability, particularly if it is part of the core safety case of the vehicle. In this scenario, it is more likely that the external data is provided as a supplement to internally generated environment data and provides context that further enhances the base capability of the vehicle.
How important is government geospatial data?
The need for public and private sector datasets is critical. Each sector has datasets that it is best placed to provide, for example the public sector organisations can deliver traffic management data.
The crucial aspect of this dynamic is that there must be a clear dialogue between the sectors regarding how the datasets are complimentary and used collectively. Clear recognition of value on both sides allowing for the sharing of data is essential. This of course requires common approaches to data standards and the latest Zenzic report on geospatial data needs is an ideal starting point.
You can find out more by downloading the Geodata report – analysis and recommendations for self-driving vehicle testing here.
Share